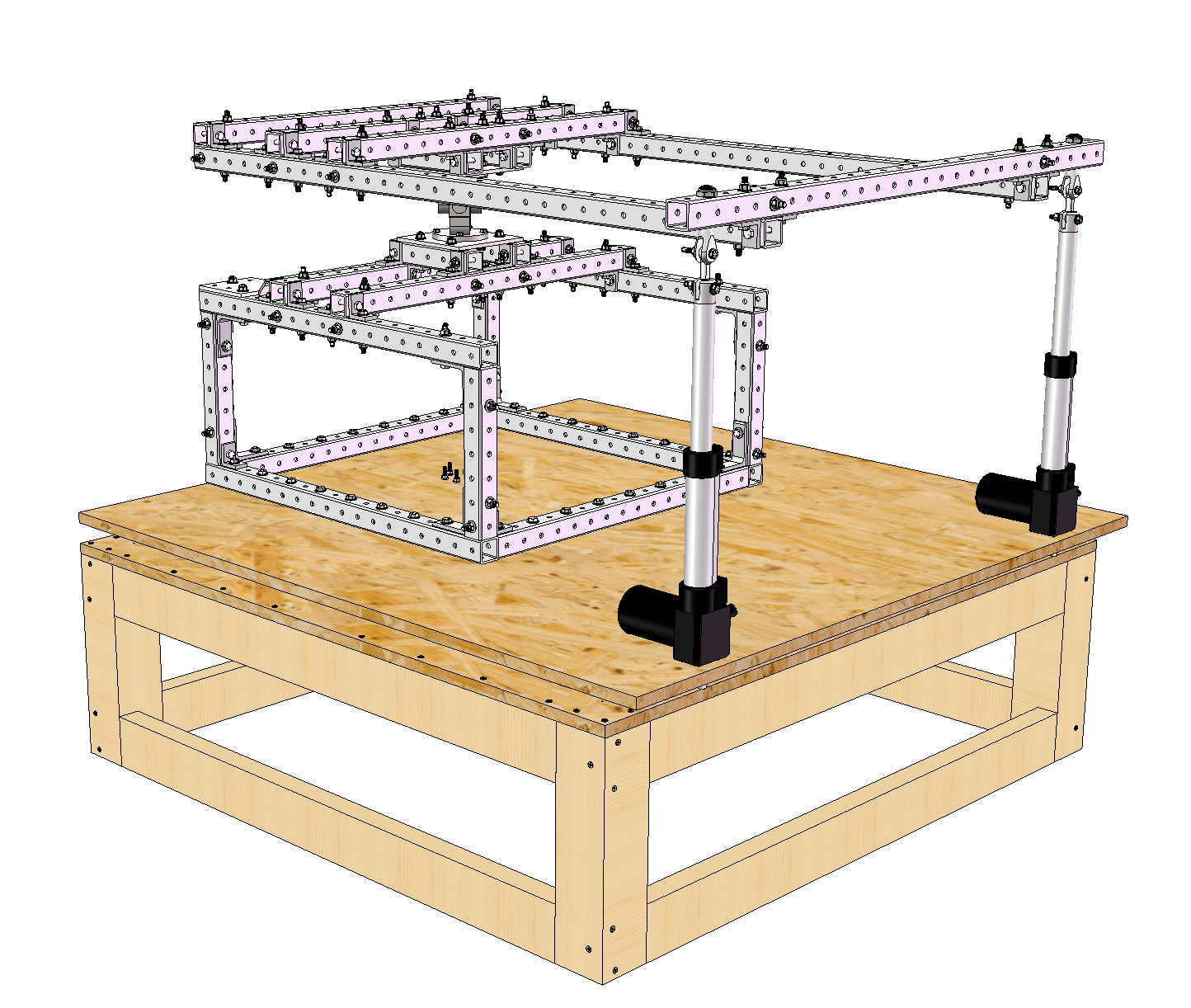
Motion Simulator Base

During Fall 2024, I served as the Captain for Motion Simulator Design Team. I oversaw both sub-teams — mechanical and electrical/software — and directly led the mechanical subteam through the process of designing a motion simulator seat and preparing for fabrication.
We started by defining our design requirements:
Three degrees-of-freedom
Roll (±15°)
Pitch (±20°)
Yaw (±40°)
Accomodates riders up to 300 pounds
$2400 budget